外观
RTOS是怎么管理任务的
为了更好地使用RTOS,我们需要深入理解RTOS工作原理,最好的方法是动手写一个RTOS。
如果你希望写一个类似RT-Thread/FreeRTOS的系统,欢迎关注这门课程:【RTOS内核开发】从0手写嵌入式操作系统
我们已经了解了任务是什么,在接下来将介绍RTOS是如何标识一个任务、如何将众多任务进行组织、按照何种策略选定任务运行。
RTOS 如何标识每个任务?——使用任务控制块(TCB)
为了唯一标识任务,RTOS内部为每一个任务都分配一个任务控制块(TCB, Task Control Block),可以理解为一个“任务档案”。
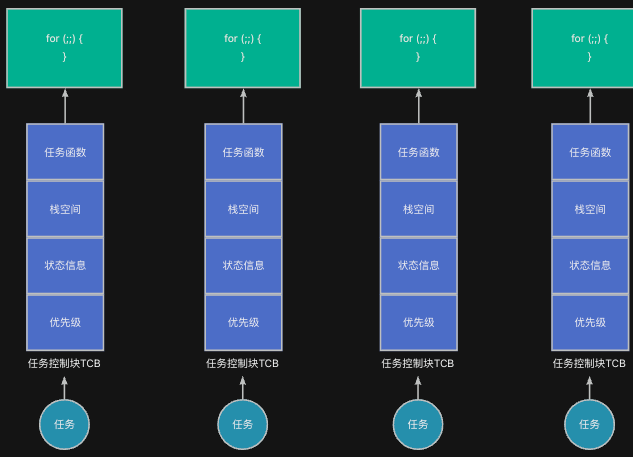
这份“档案”记录了这个任务的所有重要信息,例如前一节课时介绍的:
- 任务函数:任务的入口函数(逻辑体)
- 栈空间:保存任务运行时的临时数据和上下文
- 状态信息:就绪、运行、挂起、阻塞等
- 优先级:决定任务执行的先后顺序
具体而言,不同的RTOS会使用不同的结构体来表示任务控制块,结构体中包含不同字段来存储任务的信息。例如,对于RT-Thread,任务控制块结构定义如下:
struct rt_thread
{
/* rt object */
char name[RT_NAME_MAX]; /**< the name of thread */
rt_uint8_t type; /**< type of object */
rt_uint8_t flags; /**< thread's flags */
rt_list_t list; /**< the object list */
rt_list_t tlist; /**< the thread list */
/* stack point and entry */
void *sp; /**< stack point */
void *entry; /**< entry */
void *parameter; /**< parameter */
void *stack_addr; /**< stack address */
rt_uint32_t stack_size; /**< stack size */
/* error code */
rt_err_t error; /**< error code */
rt_uint8_t stat; /**< thread status */
/* priority */
rt_uint8_t current_priority; /**< current priority */
rt_uint8_t init_priority; /**< initialized priority */
#if RT_THREAD_PRIORITY_MAX > 32
rt_uint8_t number;
rt_uint8_t high_mask;
#endif
rt_uint32_t number_mask;
#if defined(RT_USING_EVENT)
/* thread event */
rt_uint32_t event_set;
rt_uint8_t event_info;
#endif
rt_ubase_t init_tick; /**< thread's initialized tick */
rt_ubase_t remaining_tick; /**< remaining tick */
struct rt_timer thread_timer; /**< built-in thread timer */
void (*cleanup)(struct rt_thread *tid); /**< cleanup function when thread exit */
rt_uint32_t user_data; /**< private user data beyond this thread */
};
typedef struct rt_thread *rt_thread_t;RTOS如何组织这些任务
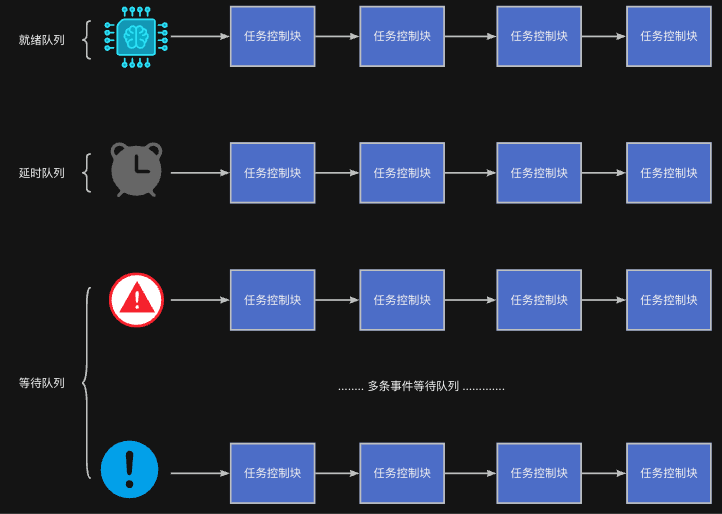
不同类型的队列
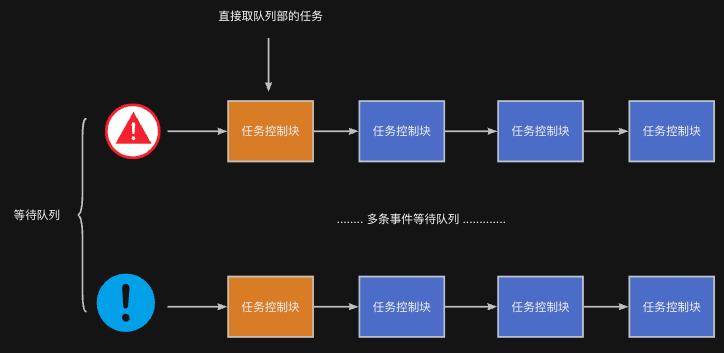
RTOS会把系统中的所有任务控制块组织成不同的队列(通常用链表)。常见的任务列表有:
- 就绪队列:排队当前可以运行的任务
- 挂起/阻塞队列:排队等待事件或资源的任务
- 延时队列:排队等待超时的任务
相关信息
任务在执行过程中,会随着其运行状态的改变而从当前所处的队列脱离,并插入到另外的队列中。当任务终止运行时,才会不处于任何队列。
RTOS 就是通过这些队列,来跟踪每个任务的“当前状态”。
RT-Thread内部的队列示意图如下:
为什么要使用队列
之所以要使用队列,主要原因有如下几点:
就绪队列:CPU资源有限,只能运行一个任务
- 大多数嵌入式系统中,只有一个 CPU,同一时间只能运行一个任务。
- 其他任务必须等待,因此需要一个就绪队列来存放那些“已经准备好,但还没轮到”的任务。
等待队列:任务可能等待资源或事件
- 有些任务会因为等待按键、等待串口接收数据、等待定时器超时等原因而不能马上执行。
- 这些任务就必须进入等待队列(也叫挂起队列、阻塞队列)。
- 等待条件满足后(如数据来了),再唤醒它们,重新放入就绪队列。
**延时队列:**任务等待时间到达
- 很多任务在运行过程中,需要延时(睡眠),或者在等待资源或事件的过程中需要加上超时机制,以避免长期死等
- RTOS会定时检查这些任务是否时间到达。为了方便管理这些任务,所有的任务加入到延时队列中。
从述内容可以看出:通过这些队列,RTOS 就可以像一个智能的调度中心,管理每一个任务的状态与位置,确保实现如下功能:
- 有资源时,任务能够马上安排执行;
- 没资源时,任务被合理安排等待;条件满足后自动唤醒继续干活。
当有可用资源或者事件发生时,选取哪个任务去占用处理
无论是CPU,还是串口数据等,都可以看作是某种资源;而像外部中断等,则可以看作是某种事件。任务在执行过程中,既需要占用资源,也需要等待某些事件的发生。
那么,如果多个任务同时希望占有某个资源,或者等待事件的发生时;RTOS应该采用何种策略来决定资源应该分配给谁,或者事件由谁去处理?
常见的三种策略:
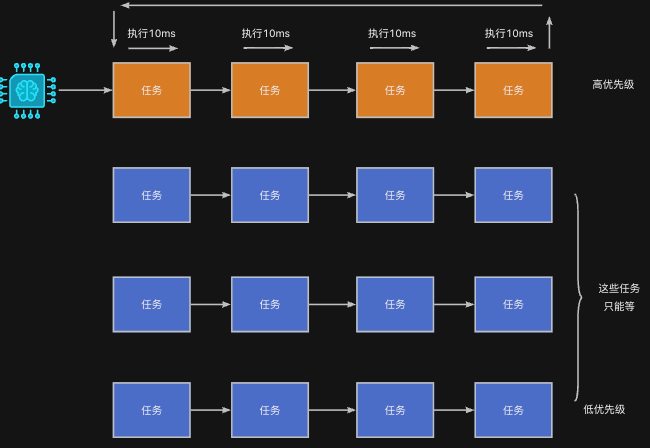
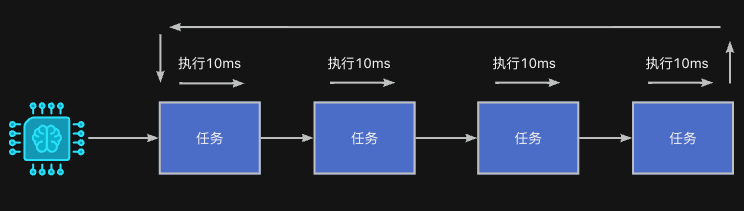
时间片轮转
这种策略主要用在CPU运行时间的安排上,其主要特点有:
- 优先级相同的任务之间,RTOS会分时执行,每个任务获得一个时间片。
- 时间片用完就换下一个任务,循环调度。
如果用生活中的例子来类比,可以理解为孩子轮流玩同一个玩具,每人玩10分钟。
而对于CPU也是一样的道理,由于每个任务里面都有while(1)循环,会长期占用CPU。所以,RTOS为了避免某个任务长期占用CPU而导致其它任务无法运行,会强制让CPU轮流在每个任务上执行一小段时间,如10ms。
先来先服务(FCFS/FIFO)
这种策略主要用在资源的占用和事件的等待上,其主要特点有:
- 谁先请求资源,谁先获得资源或先被唤醒。
- 和排队买票一样,先到先服务。
应用场景:
- 对公平性要求高,但对实时性要求不高的系统。
优先级
这种方式往往时间片轮转相结合,其主要特点如下:
- 任务根据“紧急程度”设置不同的优先级。
- RTOS 总是选择优先级最高的就绪任务来执行。
- 如果一个高优先级任务准备好了,会立即抢占正在运行的低优先级任务(前提是抢占式内核)。
类比现实生活中的场景:像急诊病人优先看病,不管你排了多久。