外观
什么是任务
为了更好地使用RTOS,我们需要深入理解RTOS工作原理,最好的方法是动手写一个RTOS。
如果你希望写一个类似RT-Thread/FreeRTOS的系统,欢迎关注这门课程:【RTOS内核开发】从0手写嵌入式操作系统
本章给出RTOS重要概念和原理的一般性介绍,这些内容独立于特定的RTOS。也就是说。该内容几乎适用于所有的RTOS。在后面的章节中,将针对RT-Thread展开介绍这些概念和原理的实际表现。
中断
为了更好地理解任务,先回顾下中断的工作机制。
相关信息
中断是嵌入式系统中的一种重要机制,用来响应外部事件。当某些硬件事件(比如串口收到数据、按键被按下)发生时,CPU 会立即打断当前正在执行的程序,去执行一个专门的中断服务函数(ISR)。
当CPU执行完中断处理程序之后,将回到原来被打断的地方继续往下执行。
如果用图来表示,其工作机制流程如下所示:
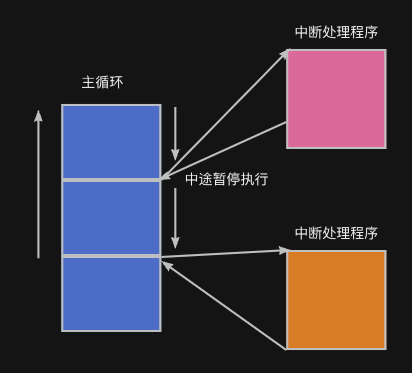
在整个系统中,可能有零个或多个会执行。当中断发生时,分别执行其对应的中断处理程序。
任务的概念
在 RTOS 中,“任务”是一段可以被单独调度、独立运行的程序逻辑。
每个任务都有自己的执行流程、运行状态和资源空间。
它就像一个小程序,可以并发地与其他任务同时运行(由 RTOS 管理)。
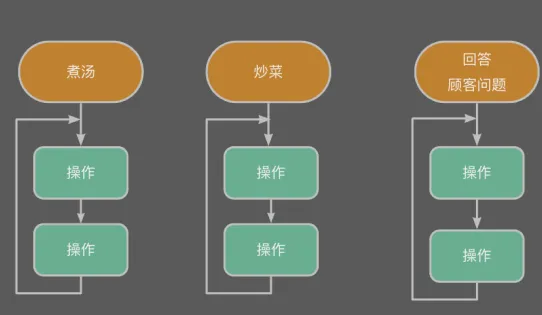
如果用之前的例子进行类比,可以认为:任务就像饭店里的员工。在饭店里,每个员工负责一件事:
- 👨🍳 厨师炒菜
- 🧑🔧 后厨搅汤
- 👩💼 前台接待顾客
这些工作互不干扰、同时进行,而不是一个人轮流做。这就好比 RTOS 中的“”。
 下面给出中断与任务的比较:
下面给出中断与任务的比较:
| 比较角度 | 中断(Interrupt) | 任务(Task / Thread) |
|---|---|---|
| 本质 | 执行一个函数(ISR) | 执行一个函数(任务函数) |
| 生命周期 | 一次性完成,执行完立即返回 | 可以长期运行,通常是一个while(1)循环 |
| 调用方式 | 由外部事件触发,系统自动调用 | 由RTOS调度机制决定哪个任务获得CPU |
| 运行时间 | 非常短,只做最关键的工作 | 可以较长,适合处理流程性或持续性工作 |
| 依赖系统支持 | 不需要 RTOS,也可使用 | 需要一个 RTOS 内核作为支撑 |
如果从项目开发的角度来说:
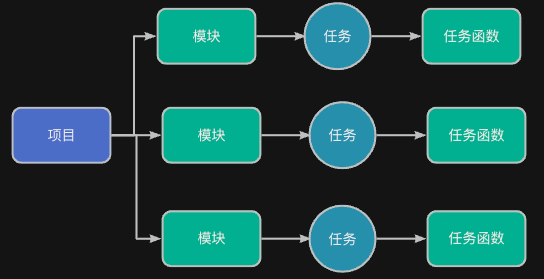
组成部分
在 RTOS 中,任务需要以下组成部分:
- 任务函数:任务的入口函数(逻辑体)
- 栈空间:保存任务运行时的临时数据和上下文
- 状态信息:就绪、运行、挂起、阻塞等
- 优先级:决定任务执行的先后顺序
针对不同的RTOS,其任务包含的具体信息有所不同,但是大体上都包含了上述的信息。

任务函数
任务函数就像一份菜谱,。在 RTOS 中,任务就像是一位厨师,而任务函数就是这位厨师的工作流程说明书。
下面以RT-Thread为例,给出任务函数的举例,其它RTOS的任务函数基本类似。
// 一个简单的LED闪烁任务
static void led_blink(void *parameter) {
while (1) {
led_toggle(LED0); // 切换LED状态
rt_thread_mdelay(500); // 延时500ms
}
}注意:这里的while(1)就是任务的主循环,它会一直运行,除非被挂起或删除。
也就说:
- 任务 = 厨师:负责完成某项工作(如炒菜、搅汤)
- 任务函数 = 菜谱:说明这项工作怎么做,一步步操作
- RTOS = 后厨经理:安排多个厨师在不同时间执行不同的菜谱
其中,RTOS 会按照任务的优先级和调度规则安排“厨师”去执行他们的“菜谱”。
栈空间(Stack)
正如中断处理程序执行时需要栈空间一样,每个任务也需要有自己的一块内存区域,用来保存函数调用时的临时变量、返回地址、CPU寄存器等上下文信息。
状态信息(任务状态)
不同于中断处理函数的一次性执行完毕,RTOS内核需要知道每个任务当前处于什么状态,从而决定它是否可以运行。
常见的任务状态:
- 就绪:可以运行,等待被调度。
- 运行:正在执行。
- 挂起:被暂停,不参与调度。
- 阻塞:正在等待某个事件或资源。
- 终止:被强制中断运行。
不同RTOS中任务状态的划分和命名方法不同,以下是RT-Thread的任务状态切换图,这个图中同样展开了任务的生命周期。
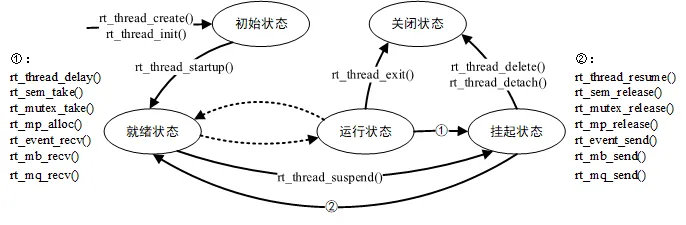
相关信息
任务的生命周期
任务“生命周期”通常指的是从 启动、创建任务、运行、调度、任务结束或退出这一整套流程。我们可以把它看作是 R任务从出生->运转->结束的全过程。
优先级(Priority)
RTOS会根据任务的优先级决定谁先得到CPU执行权,从而处理更加紧急的任务,比如处理传感器数据或控制电机,不能等太久。