外观
信号量——打个招呼再行动
为了更好地使用RTOS,我们需要深入理解RTOS工作原理,最好的方法是动手写一个RTOS。
如果你希望写一个类似RT-Thread/FreeRTOS的系统,欢迎关注这门课程:【RTOS内核开发】从0手写嵌入式操作系统
相关信息
注意,RTOS提供的信号量、互斥锁等,提供了一些比较通用的任务访问资源、行为同步的方案。它们不是某个具体的问题,所以我们在学习相关内容时,可能会感觉到有些概念和使用方法有些抽像,不好理解。
建议在学习过程中,针对自己的实际项目,看看这些功能可以如何使用。
生活示例
想象一下,当你开着车,到达一个停车场,门口有一个显示牌,写着:
🅿️ 当前剩余车位:66
这个数字代表什么?它代表当前可以停进去的车辆数。每有一辆车进来,数字就减1;而有一辆车离开,数字就加1。
当数字0时,你必须在入口等待,直至一辆车出来后你再进去;此时,车位数仍然显示为0.
而如果数字不为0,你可以直接进入,无需等待车出来;此时,车位数将减1
信号量有什么用?
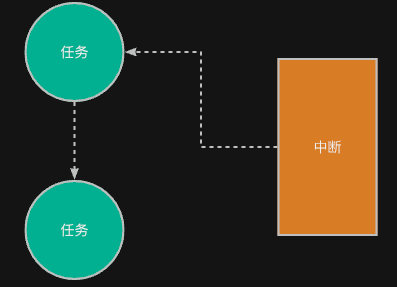
在多任务系统中,任务之间并不是完全独立运行的,常常需要某种“握手”、“通知”等方式来协作配合工作。例如:
- 一个任务等待传感器数据采集完毕;
- 主任务等待一个中断通知再继续处理;
- 多个任务共享一个队列,谁先谁后要有控制。
这时候,可以借助信号量来实现这些功能。
工作原理
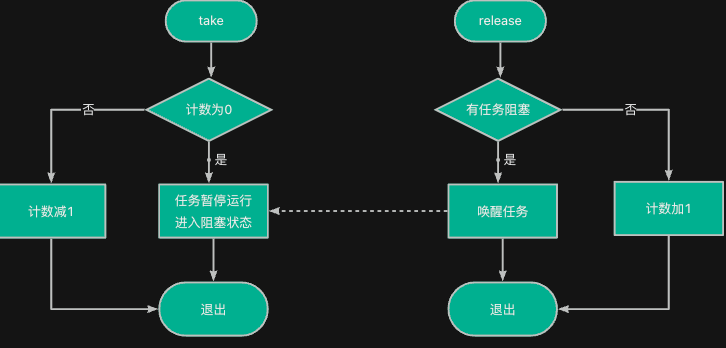
信号量是一个计数器,它控制资源访问或实现任务同步,其主要包含两个操作:
| 操作 | 说明 |
|---|---|
| take(获取、等待) | 将信号量值减 1,若为 0 则阻塞 |
| release(释放) | 将信号量值加 1,唤醒等待的任务 |
两个操作的工作流程图如下:
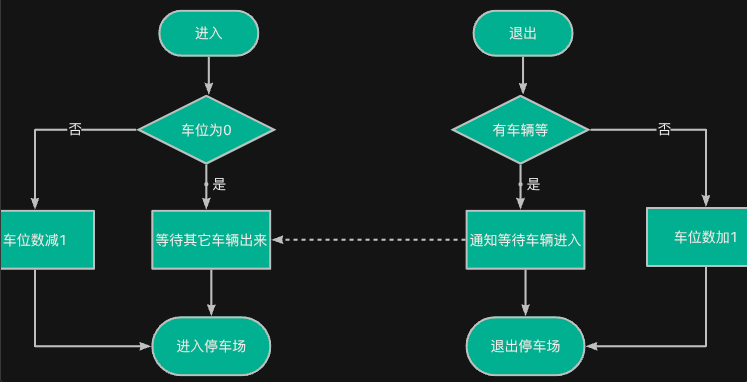
我们可以将信号量的行为对照与停车站计数的行为进行类似,可以看到二者是很相似的:
| 现实场景 | 信号量 |
|---|---|
| 停车场剩余车位数 | 等效于信号量值 |
| 有车进来,车位减1 | 获取信号量 |
| 有车出去,车位加1 | 释放信号量 |
| 没有车位了,车只能等在外面排队 | 信号量为0,任务阻塞 |
| 一旦有车离开,前面排队的车才能进 | 唤醒一个等待任务,如果无任务等待,则计数加1 |
应用示例
模拟停车场信号量
下面通过一个例子,来演示如何用信号量控制任务是否能执行指定的代码(仍以停车场为例)
#include <rtthread.h>
#include "base.h"
#include "rtconfig.h"
#include "rtdef.h"
struct rt_semaphore park_sem;
void car_entry_thread(void *parameter) {
while (1) {
// 想进停车场
rt_sem_take(&park_sem, RT_WAITING_FOREVER);
rt_kprintf("%s enter!\n", rt_thread_self()->name);
rt_thread_mdelay(2000); // 停两秒
rt_kprintf("%s exit!\n", rt_thread_self()->name);
rt_sem_release(&park_sem);
rt_thread_mdelay(1000);
}
}
int main(void) {
hardware_init();
// 初始化“停车场”,有3个车位
rt_sem_init(&park_sem, "park", 1, RT_IPC_FLAG_FIFO);
// 创建多个模拟车辆的线程
rt_thread_startup(rt_thread_create("car1", car_entry_thread, RT_NULL, 1024, 10, 20));
rt_thread_startup(rt_thread_create("car2", car_entry_thread, RT_NULL, 1024, 10, 20));
rt_thread_startup(rt_thread_create("car3", car_entry_thread, RT_NULL, 1024, 10, 20));
rt_thread_startup(rt_thread_create("car4", car_entry_thread, RT_NULL, 1024, 10, 20));
return 0;
}通过以上例子可以看出:信号量可用于控制任务是否能够访问共享资源。
- 当任务调用 take 操作时,就相当于尝试获取一把钥匙:
- 如果钥匙还剩有(计数值大于0),任务就成功拿到钥匙,继续执行后续代码;
- 如果钥匙已经用完(计数值为0),那么任务就会阻塞等待,直到有任务释放钥匙。
- 当任务调用 release 操作时,就相当于归还一把钥匙,并唤醒等待的其他任务。
相关信息
需要注意的是:
信号量只是用来“放行”,而不负责具体如何访问资源。
任务拿到钥匙(信号量)之后是否正确、安全地使用资源,仍然取决于程序自身的逻辑设计。
按键通知任务点亮LED
我们也可以在中断或任务中,通过信号量来通知另一个任务可以往下执行。例如,下面的例子中,通过按键通知LED任务点亮灯。
#include <rtthread.h>
#include "base.h"
#include "rtconfig.h"
#include "rtdef.h"
static struct rt_semaphore sem;
void led_thread_entry(void *parameter){
while (1) {
rt_sem_take(&sem, RT_WAITING_FOREVER);
led_toggle(LED0);
rt_kprintf("LED toggled by signal!\n");
}
}
void button_thread_entry(void *parameter) {
while (1) {
if (key_pressed()) {
rt_sem_release(&sem);
}
rt_thread_mdelay(100);
}
}
int main(void) {
hardware_init(); // 初始化 LED、按键等硬件
rt_sem_init(&sem, "btn_sem", 0, RT_IPC_FLAG_FIFO);
// 创建两个任务
rt_thread_startup(rt_thread_create("led", led_thread_entry, RT_NULL,
512, 20, 10));
rt_thread_startup(rt_thread_create("btn", button_thread_entry, RT_NULL,
512, 15, 10));
return 0;
}通过以上例子可以看出,信号量可以实现任务的行为同步(等待与通知)。
相关信息
行为同步指的是多个任务及中断在行为上相互协调,按一定的顺序执行,以保证逻辑正确。
在这种场景下,信号量的“计数值”代表的是“某个条件是否已经满足”:
- 当一个任务完成某个操作后,通过release 释放信号量,通知某个条件满足
- 另一个任务通过take 等待这个信号量 —— 如果还没释放,它就会阻塞等待,直到满足条件
这就像一个人拉开门栓,另一个人才得以进入房间 —— 这是行为上的顺序控制,即“同步”。
较复杂的例子
下面给出了两个任务利用信号量相互进行行为同步的例子。具体要求为:任务t1先运行,打印其计数后;t2再打印计数;之后,再输到t1打印计数。。。如此反复。
#include <rtthread.h>
#include "base.h"
#include "rtconfig.h"
static struct rt_semaphore sem1;
static struct rt_semaphore sem2;
void task1_entry (void * param) {
int i = 1;
while (1) {
rt_sem_take(&sem1, RT_WAITING_FOREVER);
rt_kprintf("Task1: %d\n", i);
i += 2;
rt_thread_mdelay(100);
rt_sem_release(&sem2);
}
}
void task2_entry (void * param) {
int i = 2;
while (1) {
rt_sem_take(&sem2, RT_WAITING_FOREVER);
rt_kprintf("Task2: %d\n", i);
i += 2;
rt_thread_mdelay(100);
rt_sem_release(&sem1);
}
}
int main (void) {
hardware_init();
rt_sem_init(&sem1, "sem1", 1, RT_IPC_FLAG_FIFO);
rt_sem_init(&sem2, "sem2", 0, RT_IPC_FLAG_FIFO);
rt_thread_t t2 = rt_thread_create("t2", task2_entry, RT_NULL, 4096, 0, 10);
rt_thread_startup(t2);
rt_thread_t t1 = rt_thread_create("t1", task1_entry, RT_NULL, 4096, 0, 10);
rt_thread_startup(t1);
}