外观
使用RTOS解决挑战
为了更好地使用RTOS,我们需要深入理解RTOS工作原理,最好的方法是动手写一个RTOS。
如果你希望写一个类似RT-Thread/FreeRTOS的系统,欢迎关注这门课程:【RTOS内核开发】从0手写嵌入式操作系统
相比之下,使用RTOS能够提升系统结构与响应能力,从而在一定程序上解决祼机开发中面临的各项挑战。
示例代码
我们可以将祼机中的示例代码,面向RT-Thread进行修改,得到的代码如下:
#include <rtthread.h>
#include "../base.h"
#define STACK_SIZE 512
#define PRIORITY_LED 2
#define PRIORITY_UART 0
#define PRIORITY_KEY 1
/* LED线程:每500ms闪烁一次 LED0 */
static void led_thread_entry(void *parameter)
{
while (1)
{
led_toggle(LED0);
rt_thread_mdelay(500); // 延迟500ms
}
}
/* 串口线程:有数据就读取并回显 */
static void uart_thread_entry(void *parameter)
{
while (1)
{
if (uart_available())
{
uint8_t ch = uart_read();
uart_write(ch); // 回显
}
rt_thread_mdelay(10); // 稍微延时避免占用过多CPU
}
}
/* 按键线程:扫描按键,按下就点亮LED1,未按下熄灭 */
static void key_thread_entry(void *parameter)
{
while (1)
{
if (key_pressed())
{
led_set(LED1, 1); // 点亮LED1
}
else
{
led_set(LED1, 0); // 熄灭
}
rt_thread_mdelay(50); // 扫描周期
}
}
/* 主函数,创建线程并启动 */
int main(void)
{
hardware_init(); // 初始化硬件基础配置
rt_thread_t tid_led = rt_thread_create("led",
led_thread_entry, RT_NULL,
STACK_SIZE, PRIORITY_LED, 10);
rt_thread_t tid_uart = rt_thread_create("uart",
uart_thread_entry, RT_NULL,
STACK_SIZE, PRIORITY_UART, 10);
rt_thread_t tid_key = rt_thread_create("key",
key_thread_entry, RT_NULL,
STACK_SIZE, PRIORITY_KEY, 10);
if (tid_led) rt_thread_startup(tid_led);
if (tid_uart) rt_thread_startup(tid_uart);
if (tid_key) rt_thread_startup(tid_key);
return 0;
}挑战一:无法处理多个任务并发执行
针对祼机开中的两种问题:所有任务串行执行,容易互相阻塞;无法响应多个“实时事件”,如 LED 闪烁与串口读取互相拖延。RTOS将每个功能用独立线程运行,任务由调度器分配 CPU,从而使得每个任务独立,互不干扰,响应快,可并发。
我们只需要针对每个任务创建一个线程,然后由单独的线程去处理。
rt_thread_t tid_led = rt_thread_create("led",
led_thread_entry, RT_NULL,
STACK_SIZE, PRIORITY_LED, 10);
rt_thread_t tid_uart = rt_thread_create("uart",
uart_thread_entry, RT_NULL,
STACK_SIZE, PRIORITY_UART, 10);
rt_thread_t tid_key = rt_thread_create("key",
key_thread_entry, RT_NULL,
STACK_SIZE, PRIORITY_KEY, 10);在每个任务中,只需要专注在自己的while(1)循环中处理相关操作,例如:
static void led_thread_entry(void *parameter)
{
while (1)
{
led_toggle(LED0);
rt_thread_mdelay(500); // 延迟500ms
}
}挑战二:响应实时事件困难
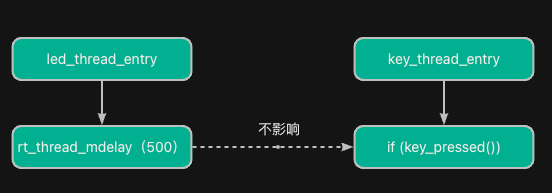
在RTOS中,对于延时或者阻塞,任务调度器会自动进行任务切换,从而让CPU去执行其它线程。这可使得系统能够有更高响应精度,不卡主循环,不漏掉关键事件。
例如,当LED任务正在延时时,使用rt_thread_mdelay()延时函数会触发CPU切换至key_thread_entry()执行。此时,在该任务中,能够及时地去检查按键是否按下,而不会像祼机程序那样必须等待延时完成之后,才有机会去检查。
挑战三:结构臃肿、代码难以维护
由于RTOS将每个任务模块封装为线程(任务),逻辑清晰,这使得程序易于添加、调试、管理,从而增强可维护性。当需要添加新的功能时,很多时候只需要创建新的线程(任务)来完成。例如:
// main.c 中注册新线程
rt_thread_create("motor", motor_ctrl, ...);
rt_thread_create("sensor", sensor_proc, ...);挑战四:无法区分任务优先级
在祼机环境,所有任务看起来是平等的,而在RTOS环境中,可以为每个任务指定优先级,从而让CPU优先去执行高优先级的任务。
例如,在上述示例代码中,三个任务的优先级分别如下(对RT-Thread来说,数值越小,优先级越高。)
#define PRIORITY_LED 2
#define PRIORITY_UART 0
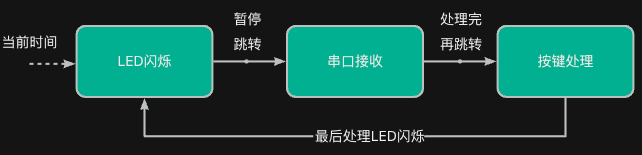
#define PRIORITY_KEY 1即优先级顺序如下图所示:
 当程序正准备执行LED闪烁时,正好串口接收到数据、按键按下;此时,CPU会转而优先处理串口数据、再处理按键按下,最后回到LED闪烁任务。
当程序正准备执行LED闪烁时,正好串口接收到数据、按键按下;此时,CPU会转而优先处理串口数据、再处理按键按下,最后回到LED闪烁任务。
小结
下面给出两种开发方式的对比,如下表所示。
| 对比项 | 裸机开发 | RTOS 开发 |
|---|---|---|
| 任务组织方式 | 单一主循环串行处理 | 多线程并发执行 |
| 是否支持优先级 | 所有任务地位平等 | 每个线程可分配不同优先级 |
| 实时响应能力 | 弱,易被阻塞 | 强,高优先级任务可随时抢占 |
| 系统可扩展性 | 差,任务多时代码混乱 | 好,结构清晰,每个任务独立管理 |
| 资源占用 | 少,适合资源极少的芯片 | 多,占用 RAM、调度器需运行 |
| 学习/开发难度 | 低,适合初学者 | 中等,需学习线程/同步机制 |
| 调试复杂度 | 增加任务后难排查 | 支持线程调试、日志打印,较易定位问题 |
| 典型应用 | 简单控制器(如温控、电风扇) | 复杂嵌入式系统(如智能音箱、无人机控制) |
不要盲目使用RTOS!!!
在实际项目中要特别注意,并不是说用了RTOS就显得你的项目有多么高大上,或者说用了RTOS后系统性能会更高、更易开发。实际上,。
相关信息
建议在系统逻辑简单、可预测、任务少时,使用裸机可以更直接、资源占用更小。而当系统逻辑复杂、有多个实时任务、存在抢占需求,推荐使用RTOS。RTOS能够提供更清晰、可靠的解决方案。