外观
消息队列-传递不定长的消息
为了更好地使用RTOS,我们需要深入理解RTOS工作原理,最好的方法是动手写一个RTOS。
如果你希望写一个类似RT-Thread/FreeRTOS的系统,欢迎关注这门课程:【RTOS内核开发】从0手写嵌入式操作系统
邮箱仅支持传递固定大小的消息内容(在32位系统上是4字节),当需要传递较大的消息时,只能通过指针的方式去传递,在有些情况下,会加重程序中管理内存的负担。
因此,有时使用消息队列会更加的方便。
消息队列机制的用途
消息队列也可用于任务之间、任务与中断之间的通信;相比邮箱,其特点如下:
| 特性 | 邮箱(Mailbox) | 消息队列(Message Queue) |
|---|---|---|
| 传递内容 | 4字节(值或指针) | 不定长的数据块 |
| 缓冲方式 | 循环队列(值/指针) | 循环队列(结构体数据) |
| 内存管理风险 | 有(需手动管理指针) | 安全(消息会拷贝进队列中) |
工作原理
RT-Thread 的消息队列由struct rt_messagequeue实现,内部维护了一个消息循环缓冲区,自动管理内存拷贝和顺序读取。其整体工作结构如下图所示:
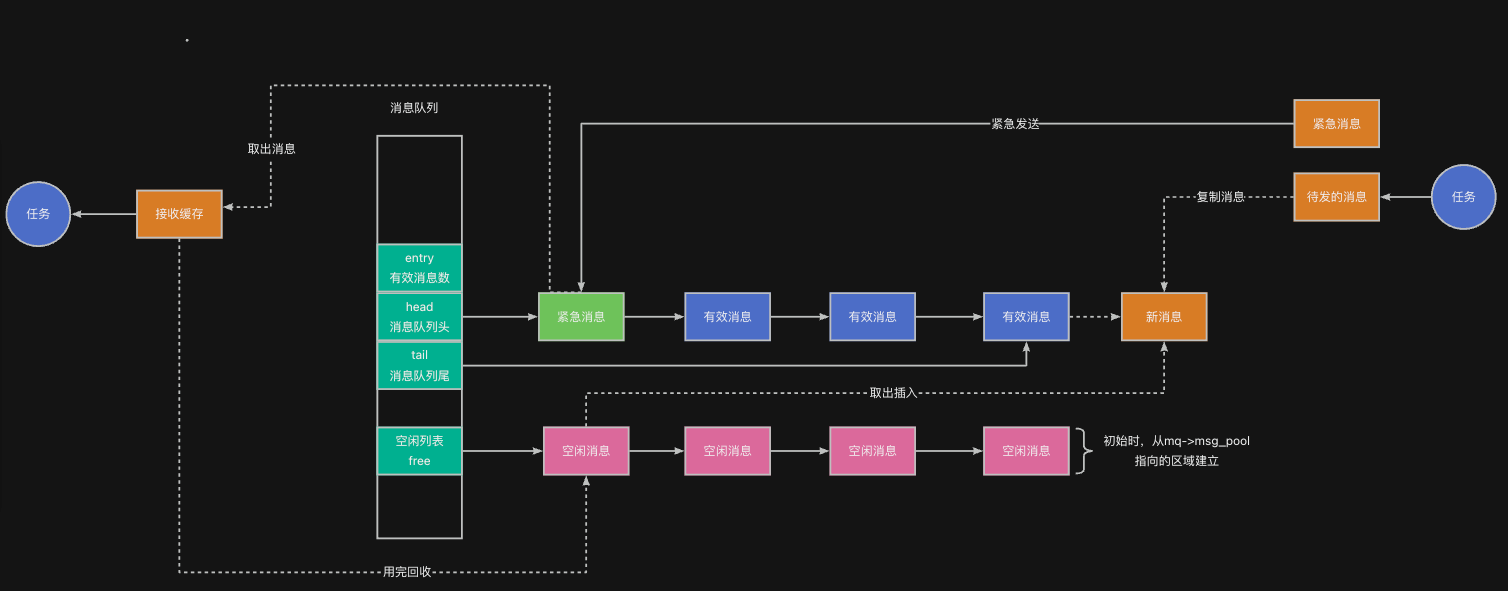
对于上述结构图,相关说明如下:
- 在消息队列内部,有相应的消息缓冲区可以存储消息,任务写入的消息会被拷贝到该缓冲区。因此,任务在完成消息发送之后,不需要继续持有待发消息的内存块。任务在读取消息时,消息会从缓冲中拷贝到任务自己的接收缓存。
- 消息队例会自动管理这些消息缓冲区。在创建消息队列时,可以指定该缓冲区最大能缓存多少个消息,每个消息的最大允许的数量字节量。
- 消息的写入和读取,可支持先进先出(FIFO),也支持后进先出(LIFO,用于发送紧急消息)
- 当消息队列已满时,发送方可以阻塞等待直至消息写入;当消息队列为空时,接收方可以阻塞等待,直至收到消息。
| 特性 | 描述 |
|---|---|
| 定长数据块 | 每个消息大小固定,初始化时指定 |
| 先进先出 | 接收者按照发送顺序获取消息 |
| 同步机制 | 满时发送者阻塞,空时接收者阻塞 |
应用示例
下面对邮箱课时中的案例进行修改,使用消息队列完成同样的功能。
示例一:传递消息编号
#include "base.h"
#include <rtthread.h>
static struct rt_messagequeue mq;
static rt_ubase_t mq_buffer[8];
void sender_entry (void * param) {
rt_ubase_t msg = 0;
while (1) {
rt_mq_send_wait(&mq, &msg, sizeof(msg), RT_WAITING_FOREVER);
msg++;
}
}
void recv_entry (void * param) {
while (1) {
// recv
rt_ubase_t msg;
rt_mq_recv(&mq, &msg, sizeof(msg), RT_WAITING_FOREVER);
rt_kprintf("recv: %d\n", msg);
rt_thread_mdelay(1000);
}
}
int main(void) {
hardware_init();
rt_mq_init(&mq, "mq", mq_buffer, sizeof(rt_ubase_t), 8, RT_IPC_FLAG_FIFO);
rt_thread_t t1 = rt_thread_create("t1", sender_entry, RT_NULL, 4096, 10, 10);
rt_thread_startup(t1);
rt_thread_t t2 = rt_thread_create("t2", recv_entry, RT_NULL, 4096, 10, 10);
rt_thread_startup(t2);
return 0;
}示例二:传递结构化温湿度数据
#include "base.h"
#include <rtthread.h>
static struct rt_messagequeue mq;
struct sensor_data {
int temp;
int hum;
};
static struct sensor_data mq_buffer[8];
static void sensor_read (struct sensor_data * data) {
data->temp = 20 + rt_tick_get();
data->hum = 50 + rt_tick_get();
}
void sender_entry (void * param) {
while (1) {
//struct sensor_data * data = (struct sensor_data *)malloc(sizeof(struct sensor_data));
struct sensor_data data;
sensor_read(&data);
//rt_mb_send_wait(&mbox, (rt_ubase_t)data, RT_WAITING_FOREVER);
rt_mq_send_wait(&mq, &data, sizeof(struct sensor_data), RT_WAITING_FOREVER);
rt_thread_mdelay(1000);
}
}
void recv_entry (void * param) {
while (1) {
// recv
struct sensor_data data;
rt_mq_recv(&mq, &data, sizeof(struct sensor_data), RT_WAITING_FOREVER);
//rt_mb_recv(&mbox, (rt_ubase_t* )&data, RT_WAITING_FOREVER);
rt_kprintf("temp: %d, hum: %d\n", data.temp, data.hum);
//free(data);
}
}
int main(void) {
hardware_init();
rt_mq_init(&mq, "mq", mq_buffer, sizeof(struct sensor_data), sizeof(mq_buffer), RT_IPC_FLAG_FIFO);
rt_thread_t t1 = rt_thread_create("t1", sender_entry, RT_NULL, 4096, 10, 10);
rt_thread_startup(t1);
rt_thread_t t2 = rt_thread_create("t2", recv_entry, RT_NULL, 4096, 10, 10);
rt_thread_startup(t2);
return 0;
}