外观
RT-Thread简介
为了更好地使用RTOS,我们需要深入理解RTOS工作原理,最好的方法是动手写一个RTOS。
如果你希望写一个类似RT-Thread/FreeRTOS的系统,欢迎关注这门课程:【RTOS内核开发】从0手写嵌入式操作系统
本课时从比较直观的角度来介绍什么是RT-Thread(Nano版本)。如果你想对RT-Thread有更深入的了解,请查看官网上的内容:https://www.rt-thread.org。
主要功能及特点
RT-Thread 是一个小型、快速的实时操作系统,专门为嵌入式设备设计。
主要采用C语言编写,针对资源受限的微控制器(MCU)系统,可通过方便易用的工具,裁剪出仅需要 3KB Flash、1.2KB RAM 内存资源的 NANO 版本。虽然 32 位 MCU 是它的主要运行平台,实际上很多带有 MMU、基于 ARM9、ARM11 甚至 Cortex-A 系列级别 CPU 的应用处理器在特定应用场合也适合使用 RT-Thread。
整体结构如下图所示(本课程只涉及其中关于硬实时内核部分)
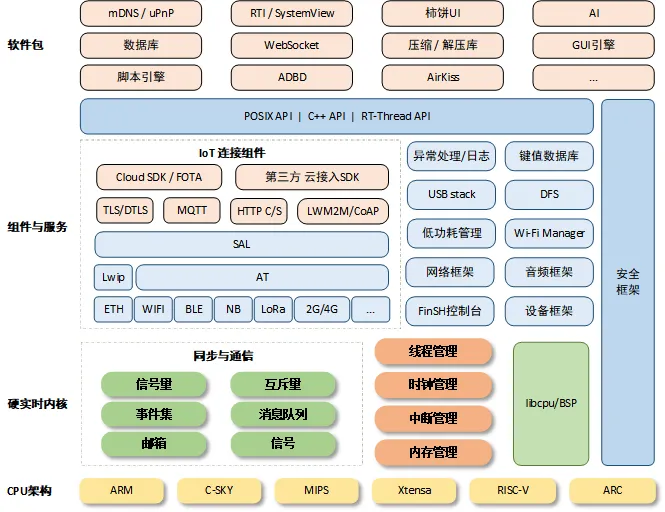
其中,对于Nano版本,具体的功能包含如下几部分:
该RTOS的主要特点有:
- 轻量级:很小巧,适合单片机用。
- 实时性好:对重要事件能快速响应,不会卡顿。
- 简单易用:结构清晰,代码好读,主要用C语言编写。
- 模块化:用什么加什么,不用的功能可以不编译进来。
- 活跃社区:文档多,例子多,新手也容易上手。
文件组织
RTOS有很多种具体的实现,其中RT-Thread是其中一种,其文件组织结构如下图所示。
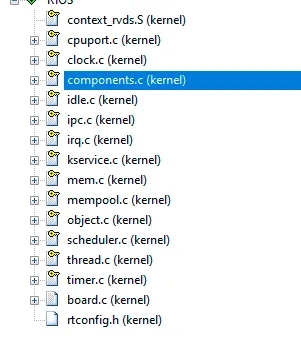 可以看到,它并不是什么非常特别的东西。本质上来说,就是一组软件代码而已。我们可以将其加入到自己的工程中一起编译运行。
可以看到,它并不是什么非常特别的东西。本质上来说,就是一组软件代码而已。我们可以将其加入到自己的工程中一起编译运行。
具体使用
我们可以基于上述文件代码,利用RT-Thread的任务管理等功能,创建多个任务完成目标功能。这些任务既可以调用RT-Thread提供的相关接口,也可以自行直接访问各种硬件外设。整体结构示意如下:
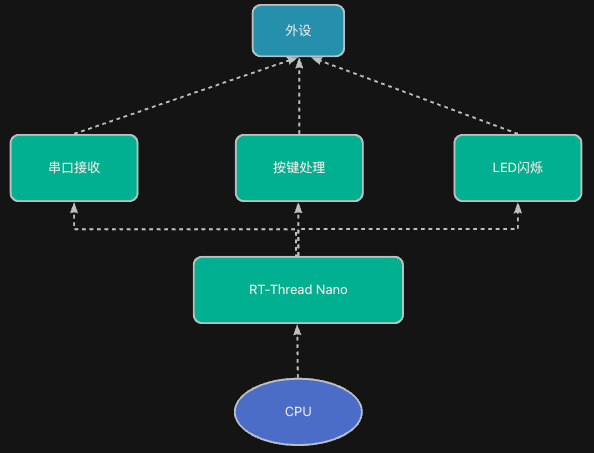
在上图结构中,包含以下几部分:
- 外设(外部设备):包括串口、按键、LED 等。
- 任务层:如串口接、按键处理、LED 闪烁等,是你写的功能代码。
- RT-Thread Nano:作为中间层,协调任务执行。
- CPU:硬件执行者,真正跑代码的核心。
如果落实到具体代码,则内容如下:
#include <rtthread.h>
#include "../base.h"
#define STACK_SIZE 512
#define PRIORITY_LED 10
#define PRIORITY_UART 11
#define PRIORITY_KEY 12
/* LED线程:每500ms闪烁一次 LED0 */
static void led_thread_entry(void *parameter)
{
led_init(LED0);
while (1)
{
led_toggle(LED0);
rt_thread_mdelay(500); // 延迟500ms
}
}
/* 串口线程:有数据就读取并回显 */
static void uart_thread_entry(void *parameter)
{
uart_init(115200); // 初始化串口
while (1)
{
if (uart_available())
{
uint8_t ch = uart_read();
uart_write(ch); // 回显
}
rt_thread_mdelay(10); // 稍微延时避免占用过多CPU
}
}
/* 按键线程:扫描按键,按下就点亮LED1,未按下熄灭 */
static void key_thread_entry(void *parameter)
{
key_init();
led_init(LED1);
while (1)
{
if (key_pressed())
{
led_set(LED1, 1); // 点亮LED1
}
else
{
led_set(LED1, 0); // 熄灭
}
rt_thread_mdelay(50); // 扫描周期
}
}
/* 主函数,创建线程并启动 */
int main(void)
{
hardware_init(); // 初始化硬件基础配置
rt_thread_t tid_led = rt_thread_create("led",
led_thread_entry, RT_NULL,
STACK_SIZE, PRIORITY_LED, 10);
rt_thread_t tid_uart = rt_thread_create("uart",
uart_thread_entry, RT_NULL,
STACK_SIZE, PRIORITY_UART, 10);
rt_thread_t tid_key = rt_thread_create("key",
key_thread_entry, RT_NULL,
STACK_SIZE, PRIORITY_KEY, 10);
if (tid_led) rt_thread_startup(tid_led);
if (tid_uart) rt_thread_startup(tid_uart);
if (tid_key) rt_thread_startup(tid_key);
return 0;
}其中,RT-Thread就像一个总调度员,让 CPU 有条不紊地在多个任务之间切换,从而实现各个任务都能在自己的while(1)循环中执行。最终的结果就是多个while(1)循环同时跑了起来。