外观
优先级调度 — 让重要任务先走
为了更好地使用RTOS,我们需要深入理解RTOS工作原理,最好的方法是动手写一个RTOS。
如果你希望写一个类似RT-Thread/FreeRTOS的系统,欢迎关注这门课程:【RTOS内核开发】从0手写嵌入式操作系统
在某些情况下,我们可能希望指定的任务能够优先运行、甚至是打断其它任务的执行,因为该任务要完成的工作更加紧急或重要。为解决此问题,可以为该任务指定更高的优先级。
什么是优先级调度
我们已经知道,很多RTOS会采用优先级队列来组织所有已经就绪的任务。同样地,RT-Thread也不例外:
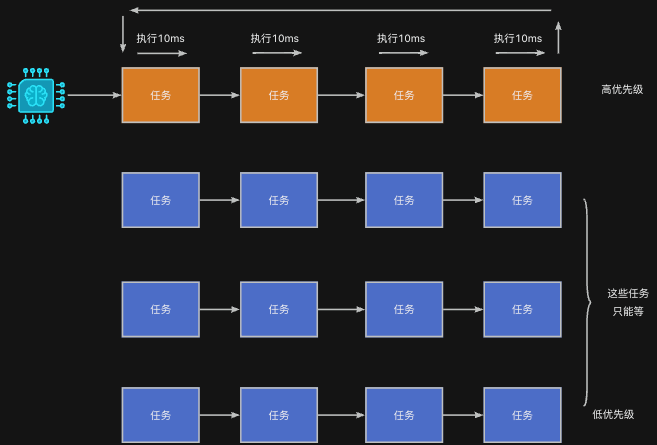
RT-Thread内核支持基于优先级的抢占式调度:
- 每个任务在创建时会指定一个优先级(0~255,数字越小,优先级越高)。
- 内核总是选取当前就绪任务中优先级最高的任务来运行。
- 当有更高优先级的任务进入就绪态,调度器立即中断当前低优先级任务,切换到高优先级任务。
相关信息
可以看到,高优先级的任务总是有优先运行的机会,它会打断低优先级任务的运行,抢占执行机会。--- 抢占式调度
示例代码
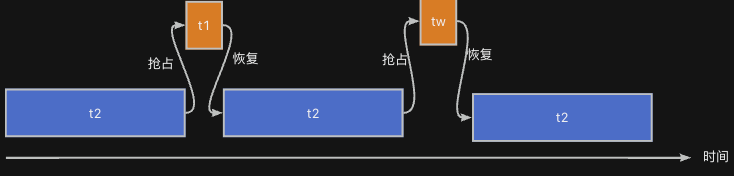
如下图所示,演示了高优先任务t2抢占低优先级任务t1运行机会的情况。当t2使用for()进行延时时,t1没有任何运行机会;而只有当t2使用rt_thread_mdelay()进行延迟时,即主要放弃CPU暂停运行,t1才有运行的机会。
#include <rtthread.h>
#include "base.h"
void task1_entry(void *param) {
RT_UNUSED(param);
while (1) {
rt_kprintf("Task 1 is running\n");
// 忙等待模拟工作
//for (int i = 0; i < 100000; i++);
rt_thread_mdelay(200);
}
}
void task2_entry(void *param) {
RT_UNUSED(param);
while (1) {
rt_kprintf("Task 2 is running\n");
for (int i = 0; i < 100000; i++);
}
}
int main(void) {
hardware_init();
// 0 --
rt_thread_t t1 = rt_thread_create(
"t1",
task1_entry,
RT_NULL,
1024,
10, // 相同优先级
20 // 时间片为5个tick, 20*1ms = 20ms
);
rt_thread_t t2 = rt_thread_create(
"t2",
task2_entry,
RT_NULL,
1024,
20, // 相同优先级
40 // 40*1ms = 40ms
);
if (t1) rt_thread_startup(t1);
if (t2) rt_thread_startup(t2);
return 0;
}运行过程的分析示意图如下:
注意事项
由于引入了优先级,在为任务配置优先级时需要注意以下事项。
- 优先级设计要合理:不合理的优先级设置可能导致低优先级任务“饿死”。
- 避免高优先级任务一直占用 CPU:要合理加入rt_thread_mdelay()或rt_thread_yield()等接口
- 不要所有任务设为同一个优先级,否则调度结果受时间片影响,无法体现优先级机制。