外观
你必须知道的坑——定时器使用注意事项
为了更好地使用RTOS,我们需要深入理解RTOS工作原理,最好的方法是动手写一个RTOS。
如果你希望写一个类似RT-Thread/FreeRTOS的系统,欢迎关注这门课程:【RTOS内核开发】从0手写嵌入式操作系统
本小节介绍定时器使用时的常见注意事项,从而避免常见错误和不当用法,实现学会在实际项目中更稳定、安全地使用定时器
回调函数运行在中断/任务上下文
对于HARD_TIMER模式的定时器,由系统时钟节拍中断处理程序扫描定时器列表并执行回调函数;因此,rt_thread_mdelay()等让当前中断暂停执行的API。RT-Thread可能无法处理这种问题,进而导致整个系统运行出现混乱。
同样地,对于SOFT_TIMER模式的定时器,由定时器任务扫描并执行回调函数;使用rt_thread_mdelay()等让当前任务暂停执行的API。这将造成定时器任务无法及时扫描并执行其它定时器的回调函数。
相关信息
因此,在定时器回调处理函数中,最好是快速完成相关的工作。如果有耗时的任务,建议交由其它任务去完成。
例如,可以通过简单地设置标志位(或者用信号量、消息队列等机制)来实现这种操作。
#include <rtthread.h>
#include "base.h"
// 全局定时器句柄
rt_timer_t led_timer;
// 标志变量:标志LED是否停止
volatile rt_bool_t led_stopped = RT_FALSE;
// 回调函数
static void led_timer_cb(void *parameter)
{
RT_UNUSED(parameter);
led_toggle(LED0); // 切换 LED 状态
static int count = 0;
if (++count >= 20)
{
rt_timer_stop(led_timer); // 停止定时器
led_stopped = RT_TRUE; // 设置标志位
}
}
// 打印线程入口
static void print_task_entry(void *parameter) {
RT_UNUSED(parameter);
while (1) {
if (led_stopped) {
rt_kprintf("LED stopped flashing after 20 times.\n");
// 为了不重复打印,只执行一次后清标志
led_stopped = RT_FALSE;
}
rt_thread_mdelay(200); // 每200ms检查一次
}
}
int main(void)
{
hardware_init();
// 创建LED定时器,500ms周期,周期性,软定时器
led_timer = rt_timer_create("led_t",
led_timer_cb,
RT_NULL,
rt_tick_from_millisecond(500),
RT_TIMER_FLAG_PERIODIC | RT_TIMER_FLAG_SOFT_TIMER);
if (led_timer != RT_NULL)
{
rt_timer_start(led_timer); // 启动定时器
}
// 创建任务线程,检测 LED 状态
rt_thread_t tid = rt_thread_create("print_task",
print_task_entry,
RT_NULL,
1024,
20,
10);
if (tid != RT_NULL)
rt_thread_startup(tid);
return 0;
}定时准确度
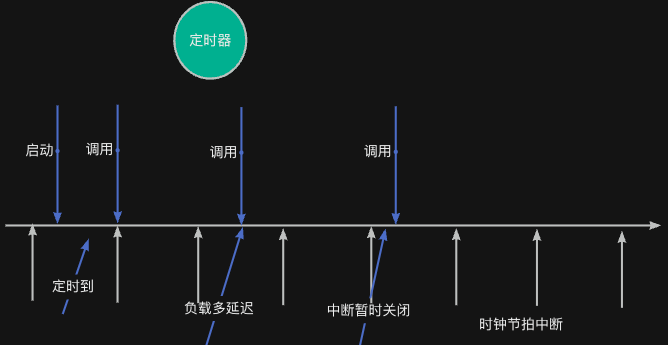
虽然RT-Thread的定时器可用于实现毫秒级别的周期性事件,但它并不一定能实现“精确定时”。
也就是说,假设设置了一个定时器每1000ms执行一次,但它实际触发的时间可能是1002ms、998ms。
| 因素 | 说明 |
|---|---|
| 系统时钟节拍周期 | RT-Thread 使用tick计时(默认1 tick = 1ms),无法实现小于一个系统时钟节拍时期的时长定时。 |
| 系统负载 | 对于SOFT_TIMER定时器而言,当系统任务过多,或者高优先级任务长时间占用 CPU,定时器线程无法及时执行回调函数,从而产生延迟。 |
| 定时器数量 | 由于系统中定时器进行了排队,当队列中定时器较多且超时的任务较多时,会延后后面的定时器的任务执行。 |
| 定时器类型 | 对于HARD_TIMER定时器而言,当程序中中断屏蔽时间太长时,将影响到系统中定时器回调函数的执行时间。 |
| 中断屏蔽时间 | 如果代码中大量禁用了中断,也可能延迟系统时钟节拍的响应,从而影响定时器触发时机。 |
| 使用不当 | 比如在定时器回调中做了太复杂的操作,影响下一次周期到达。 |
下面通过一个简单的图示,可以看出定时器回调函数不一定被准时调用。
HARD/SOFT定时器,该选哪种?
在 RT-Thread 中,创建的定时器可以是“软定时器(SOFT)”或“硬定时器(HARD)”。这两者都会在设定的时间后回调一个函数,但触发机制不同,会影响程序的实时性和安全性。
想实现“定时1秒闪灯”,你会选择哪个?
我们已知这两种类型的定时器各有特点,我们在实际使用时可以参考如下表格:
| 类型 | 执行位置 | 响应速度 | 回调函数限制 | 使用场景 |
|---|---|---|---|---|
| 硬定时器 | 中断上下文 | 快速、精确 | 严格,不能阻塞、不允许长时间计算 | 实时性强、快速响应任务,如数据采集、电机控制等 |
| 软定时器 | 定时器任务 | 稍慢 | 灵活,可调度任务、可打印 | 日常逻辑定时处理,如LED闪烁、状态轮询、自动保存等 |
例如,对于下述场景,我们可以根据这两类定时器特点做出不同的选择;
| 应用场景 | 推荐使用 |
|---|---|
| 1s 闪烁 LED 指示灯 | 软定时器 |
| 数据采集每 1ms 精确触发 | 硬定时器 |
| 10 秒后保存参数到 Flash | 软定时器 |
| 定时唤醒线程处理数据 | 软定时器 |
| 快速响应 GPIO 变化的处理 | 硬定时器 或中断 |
也就是说,在选择使用定时器时,我们可以:
- 如果需要在中断上下文中快速响应,选择硬定时器
- 如果需要安全灵活的定时处理逻辑(比如打印、处理逻辑),优先选软定时器
- 实在不确定?建议从软定时器入手,再根据性能需求调整
相关信息
特别要注意:当系统中HARD_TIMER定时器较多且执行时间较长时,将大大影响时间片调度的执行。
总结
- 定时器功能强大但容易误用,需了解其运行环境(HARD、SOFT)
- 回调中避免耗时操作,用信号量交由线程处理
- 动态定时器和封装结构可实现更灵活设计
- 精度与tick配置、系统负载密切相关
补充说明
在视频中,我写了这样的代码。如果实际调试,可能会发现,main无法继续往下执行rt_timer_create()等函数,CPU会一直执行threa_entry()中的while(1)循环。
之所以如此,是因为rt_thread_startup(thread)执行时,由于thread的优先级为0(最高),RT-Thread会转而执行该任务的代码。而由于 thread_entry()一直在死循环,没有延时、挂起等操作,所以一直占用CPU运行,导致低优先级的main任务、定时器任务无法运行。
#include <rtthread.h>
#include "base.h"
#include "rtconfig.h"
static rt_timer_t led_timer;
static void led_timer_cb (void * parameter) {
led_toggle(LED0);
static int count;
if (++count == 20) {
rt_timer_stop(led_timer);
}
}
struct rt_timer oneshort_timer;
static void oneshort_timer_cb (void * parameter) {
led_toggle(LED1);
rt_timer_start(&oneshort_timer);
}
void thread_entry (void * param) {
while (1) {
}
}
int main (void) {
hardware_init();
rt_thread_t thread = rt_thread_create("thread",
thread_entry, RT_NULL,
4096, 0, 200);
rt_thread_startup(thread);
led_timer = rt_timer_create("led",
led_timer_cb, RT_NULL,
rt_tick_from_millisecond(10), // tick
RT_TIMER_FLAG_PERIODIC );
rt_timer_start(led_timer);
rt_timer_init(&oneshort_timer, "oneshort",
oneshort_timer_cb, RT_NULL,
3*RT_TICK_PER_SECOND, // rt_tick_from_millisecond(3000),
RT_TIMER_FLAG_ONE_SHOT | RT_TIMER_FLAG_SOFT_TIMER);
rt_timer_start(&oneshort_timer);
return 0;
}